
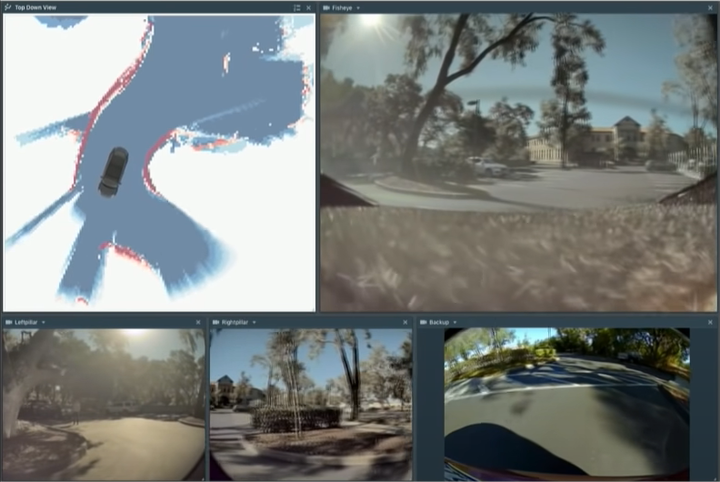
AP主要靠視覺,不使用光達和高精度地圖

上方是各種難辨識的Stop Sign,下方是「右轉不需停等」的Stop Sign (特例)

智慧召喚眼中的停車場
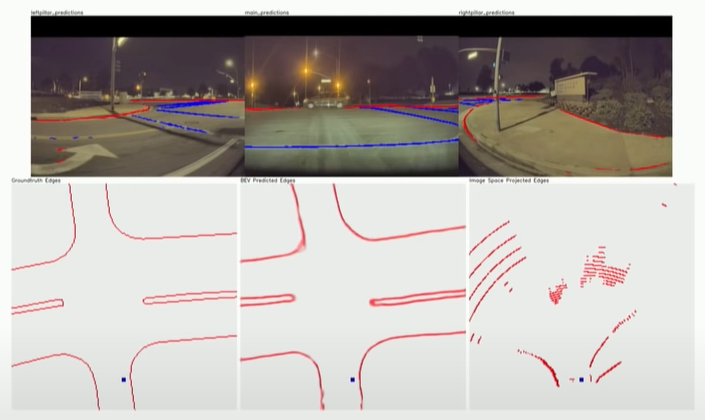
3D方法的辨識成果 (左:實際/中:3D/右:傳統2D)
不需光達,以單一鏡頭的影像就能準確判斷周遭環境的「深度」(距離)
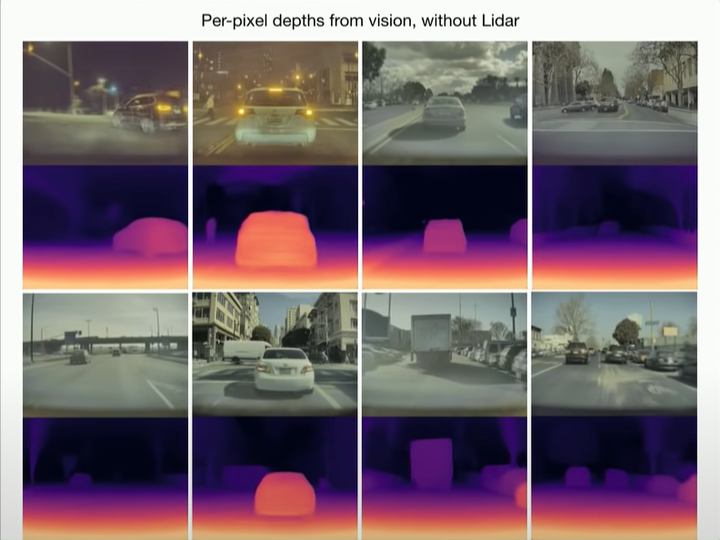
Pseudo-LiDAR from Visual Depth Estimation: Bridging the Gap in 3D Object Detection for Autonomous Driving (2018/12/18)
https://arxiv.org/abs/1812.07179
來源:https://www.youtube.com/watch?v=hx7BXih7zx8




























































































