天衣神水 wrote:蜂眼看起來長長的是因(恕刪) 你還是聽不懂我的意思,要避浪、避震大幅調整波束方向,要在Y軸有足夠的天線陣。只有長寬比像蜂眼,SPY-1這種對空雷達陣才有辦法,平面相陣雷達這種Y軸不夠多陣列雷達都沒辦法。要躲避風浪就是要在Y軸有大量餘裕。平面陣沒辦法做到,自然要用機械補償船隻的漂移。
天衣神水 wrote:蜂眼看起來長長的是因(恕刪) 精確說,Thales Smart-s不是Hexapod!雖然都是史都華機構, 但是三軸跟六軸還是有不同。smart 只有三軸。 在海上晃這樣大, 用六軸會搞死自己。
macross_sato wrote:精確說,Thales Smart-s不是Hexapod!雖然都是史都華機構, 但是三軸跟六軸還是有不同。 設計商業產品的原則是,只要能省就該省SMART-S 用了結構簡單的水平儀加上電子補償到了MK2,就改用三軸,外加橫向力臂,也是機械平衡外加電子補償 (中科院「海鷹眼雷達」也是機械平衝外加電子補償)如果還搞不定,六軸難搞也得上去試試。但是,「光榮之星」上面那座「海蜂眼」卻是什麼機械平衡都沒有,要嘛院方還沒加上去,不然就是中科院有新的方式 (或許是全電子補償?)來解決這的問題。
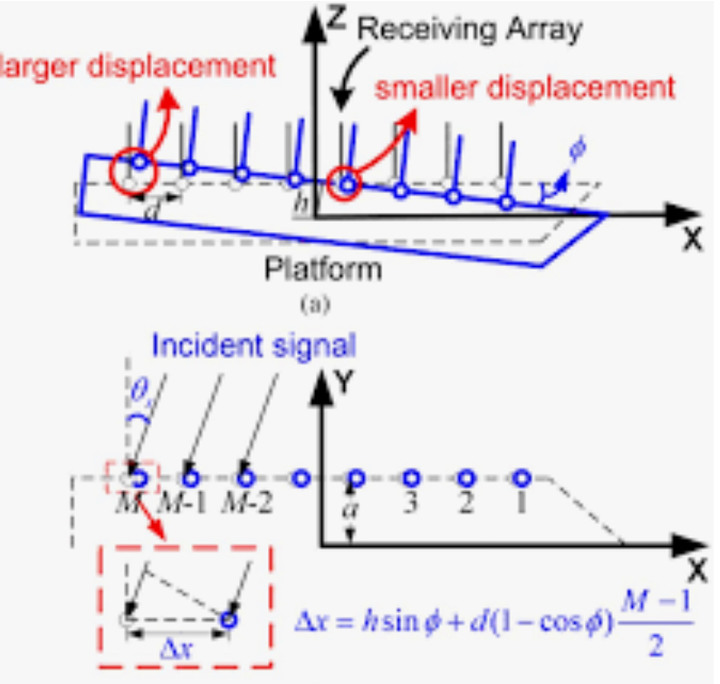
TW Energy wrote:你如果願意把波束角打的離海平面很高,那就當我沒說。 中科院對於「艦載相列雷達之電子式船搖補償技」的說明艦載相列雷達在風力、海浪造成搖晃的影響下進行空間目標物的搜索及追蹤,天線波束指向將因此產生誤差,若要正常的對目標物進行搜索與追蹤則需要進行波束指向姿態角度補償。傳統的解決方案是建構機械伺服穩定系統來補償船搖的影響,傳統機械式動作是用「轉動雷達天線」的方式來改變波束指向。此機械伺服系統缺點為系統結構笨重、反應時間長、雷達測量精準度受到機械伺服機構限制。而相列天線是用天線元件直接改變雷達波束指向,不是使用「轉動天線」的方式,因為電子元件的反應速度比機械伺服快得多;而這種不靠天線運動就能改變波束指向的補償方式,稱為「電子式補償技術」。相列雷達採用電子式船體補償機制,在三維空間實現無慣性的精準波束指向。利用船艦既有的電羅經來補償晃動對波束指向的影響,不但可提高整體系統的可靠度及維護度,而且也可獲得良好的補償效果。因此本論文提出一個艦載相列雷達之波束指向誤差估測與補償機制進行模擬與實測。從實驗室模擬與海上實測的結果可知,我們提出的電子式船搖補償技術可以得到高度的誤差補償準確度及更快的反應時間。基本上是用演算法和系統的反應速度來達成
天衣神水 wrote:中科院對於「艦載相列(恕刪) 電子式補償就是一般陣列雷對空的掃描角度調整,沒有那麼玄。你的船身偵測到陀螺儀傾斜10度角,雷達波束就是要補償10度角。但是平面陣列雷達的Y軸陣列數量如果不夠,那補償的角度精確度就沒辦法精細調整,唯一做法就是再往上更多調整而不至於碰到海浪。造成的副作用就是雷達波束角度脫離海平面。導致在大風浪的時候低空飛彈脫鎖。為什麼陣列雷的相位飄移器這麼重要,天線場型那麼重要,如果角解析度不足,角度做不出來,雷達本身就是缺陷。