skylink_08 wrote:都普樂雷達只對移動物品有反應...對靜止物GG 願聞其詳.都卜勒效應是波源和觀察者有相對運動.縱使有靜止物,但車子是移動的.Q: 有配置 都卜勒雷達 ? (測速雷達都是應用都卜勒效應,不是嗎?)
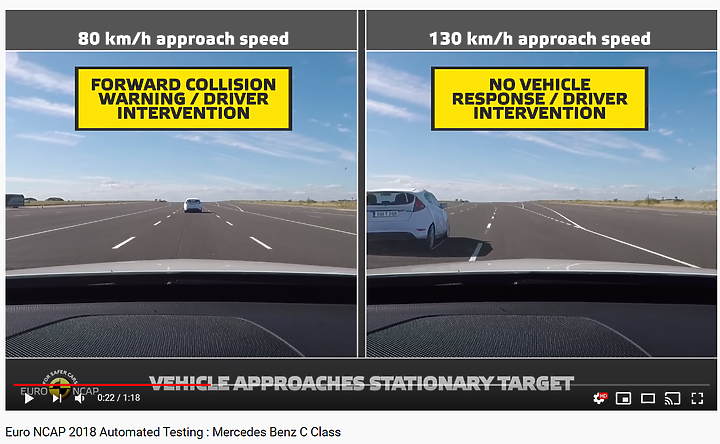
sic53 wrote:6/1國道一號中山高南下嘉義段發生特斯拉車禍,請問,配備23P車輛如果在駕駛員不採取任何動作下,有開啟ACC和無開啟ACC情況下,配備23P車輛是否能安全煞停呢?謝謝! 應該不會煞停,底下是Euro NCAP的實際測試Euro NCAP 2018 Automated Testing : Mercedes Benz C Class之前版上有討論過了請問23P遇到靜止的工程車,會像Volvo一樣直接撞上去嗎?特斯拉只要她認得出來的障礙物(看起來有像是車子或真人的物件)還是會停 認不出來的...就只能等AEB介入了 or 撞上去了Tesla Autopilot: Vehicle Moves Out--Exposing Stationary Vehicle In Front完整的比較可以去下面看2018 Automated Driving Tests
frank8932 wrote:所以面對一面牆衝上去,車子是不會自動煞停的?相對倒車卻會煞停的,是這樣嗎? 關鍵是速度極慢速度 (比如倒車),超音波感應器可以來得及偵測障礙物驅動剎車中等速度 超音波反應太慢沒啥用,得靠測距相機(比如stereo camera)或毫米雷達波高速的時候,得在相對遠的距離作出法應,但遠距離的情況下 測距相機(比如stereo camera) 效果不好 只剩下毫米波雷達可以救援但毫米雷達波會忽略靜止物體.....所以高速接近靜止物體是目前輔助自駕的一大罩門等到測距相機有反應的時候,可能已經太晚了 (剎車踩到底照樣會用不低的速度撞上去)要解決這問題,就是要靠雷射測距儀,也就是俗稱的LiDAR如果裝不起LiDAR,目前第二好的選擇大概就是特斯拉的Virtual LiDAR (用影像辨識去判讀物體跟估測距離)Virtual LiDAR就跟人類的視覺系統很像。人會因為視錯覺而誤判,Virtual LiDAR也因此是存在一定的誤判機率的。