Gullit168 wrote:
假設在順向的2號車道上,前方有一台A車時速100的車輛行駛、後方有一台B車時速105的車輛行駛
1.若全三車道只有A、B兩台車,因此隔壁1號車道處於open狀態
B車可以很順利的於接近A車的安全距離之前即變換車道超車
此時,2號車道無堵塞之事實、甲公路無壅塞之事實
2.若全三車道有A、B、C三台車,且隔壁1號車道剛好有一台時速110的C車正進行超車(超越B車),因此當B車已經與A車處於安全距離之下,無法第一時間進入隔壁車道超車,因此只能先降速等待
此時,2號車道有堵塞之事實、甲公路無壅塞之事實
3.若全三車道處於大車流的狀態下,B車被A車堵塞之後,又因為隔壁車道一直無有效的空間切入,更後方的D車、E車陸續也被前車阻塞,且1號車道也被填滿變換車道空間,3號車道也被填滿無變換車道空間
此時,2號車道有堵塞之事實、甲公路有壅塞之事實
若全三車道只有A、B(在1號車道上)、C(在2號車道上)兩台車
1.在順向的1號車道上,前方有一台A車時速105的車輛行駛、後方有一台B車時速110的車輛行駛
若B車已經與A車處於安全車距下,只能被迫減速,或是利用較危險的右側超車
2.當然也可能剛好碰到2號車道上有台100的C車在行駛,所以B車除非橫跨兩的車道到3號車道上
此時,1號車道有堵塞之事實、甲公路無壅塞之事實
單一車道堵塞並不代表公路壅塞、公路壅塞代表全車道都有堵塞
...(恕刪)
實在不想在說, 同樣的事一直在繞圈
又在繞文字迴圈
此段文字再度陷入"車速"決定"堵塞"的迷思 , 自蹈"陷阱"之中而不自知
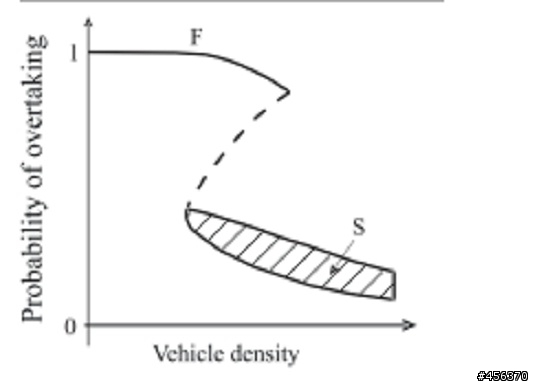
1和2,所述皆屬於 S-stable 車流, 超車道能正常使用,為F車流,何來堵塞 ?
除非超完車不離開
S 車流的車速本來就受到前車之制約, S-stable車流還在行進當中,如何稱為堵塞 ?
3的堵塞是因為無法超車所造成。
所有車道都無安全車距,三車道皆屬於S-stable車流,一旦超車道進入S-stable車流,即無超車可能。無超車舒解車流,車帬當中,只要有一台車為保持安全車距而減速 下一步就註定是進入走走停停的 S-metastable 車流。
行車道和超車道的密度, 是相互影響的
當超車道有功能, 行車道的車輛能進入超車道, 行車道就能舒解, 何來堵塞 ?
又繞迴圈
森林不是只有三棵樹, 只見ABC三樹木, 不見森林中千千萬萬的樹木, 無異於以管窺天
佔用超車道不走, 讓後車無法超車,無論車速多少, 就一定會造成"堵塞"
Gullit168 wrote:
行車道(非超車道)有一台慢車,後方的車輛想進入超車道超車,
卻造成車流擾動,最後壅塞,所以慢車才是道路的瓶頸
...(恕刪)
此文句完全推翻超車道的設計,用常理無法理解在說什麼 ?
正常使用超車道,是超越到前方去,而且回到原車道。 怎麼會造成車流擾動? 還最後壅塞? 這樣, 擾動了那一個車道的那一台車?
Gullit168 wrote:
而且這個模型也有個問題,當第一次變換車道時,上游車輛突然爆增,很明顯上下游的流量根本不一樣
而且不僅流量不一樣,行車道後來出現車輛的不僅流量高、車速也比一開始快
這個模型設計上,讓它多跑久一點,即使一開始不變換車道,最後都會壅塞....
另外影片中也是中內線車一堆,外線車車流密度低
今天這個影片的地點改成在台灣,大概就一堆網友馬上高潮說台灣的法律就造的交通亂象...
裡面哪邊又提到內線車道了...
如果假設在內側車道掉速,那就該離開超車道,哪邊有問題??
而且這個模型也是,一開始的車流量大,所以交通看起來混亂
等LED版亮燈時,同時車流量變小,看起來變成交通順暢的假象...
如果是以一開始的流量設定,又要禁止變換車道
包準行車線塞滿滿的車
模型不是這樣設計的.....
而且看來看去,沒有一個模型可以跟"超車道以最高速行駛發生壅塞"扯上邊的
...(恕刪)
這是"東日本高速道路株式会社"(East Nippon Expressway Company Limited)的宣導影片
它可以預測何時會發生"渋滞", 事先採取許多措施
http://www.e-nexco.co.jp/road_info/comfort_drive/
http://www.e-nexco.co.jp/activity/safety/detail_07.html
它的背後是運用許多數據,報告,實驗 之後, 才決定這樣做
看來您真的非常"一言九鼎",沒有提任何證據,就可以說" 模型錯誤" ?
您要說人家的模型錯誤, 請提出實證,完全看不出您在說什麼 ?
因為有"速差",所以 "超車道以最高速行駛,永不離開,會發生壅塞"
行車走行車道, 有超車行為才開上超車道,無超車行為就離開, 這樣很難嗎?