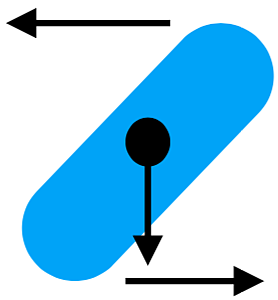
首先設定車頭超前的方向為正Z軸,車身左側為正X軸,上方為正Y軸

原影片網址如下:
https://www.facebook.com/MotoGP/videos/10157002591585769/
在過彎的時候機車都會有負X軸的離心力,而都是靠車頭打舵角使前輪產生正X軸的向心力,因此前輪都會承受比較多的力而產生避震壓縮,也有比較後輪大的X軸力。
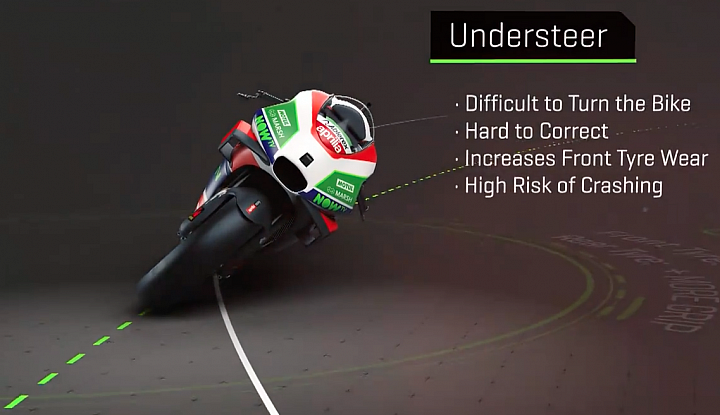
這時候若把手推更多(Understeering),就是前輪往外傾就會loss掉前輪的負荷,等於把前輪的向心力轉為車子的傾角,就是下半身朝外,上半身朝內
此時前輪會產生的反應就是輪胎負荷降低、避震行程拉長。但Understeering所產生的力除了對龍頭放鬆外,也因為這個扭動會把順時鐘旋轉的力傳到三角台、車架,最終傳到後輪。而後輪因為不會轉向,所以所有力都會到達後輪之後負重在輪胎上,就是影片所說的
Fornt Tyre: - LESS GRIP
Rear Tyre: + MORE GRIP
的部分。
至於接下來提到四點的物理意義照我的理解如下:
-Difficult to Turn the Bike
因為逆舵就是把轉向的力量loss掉來取得更大的傾角,所以前輪在反向的過程是在增加車身的迴旋半徑,自然若要縮小回旋半徑的這點上來說就會比較困難了。
-Hard to Correct
Understeering的進彎方式對車來說就是類似“拋進去”的狀態,加上前輪抓地力低的情況下若要做任何修正都必須的等到前輪的抓地力回來了才能夠達成。所以在這種進彎狀態下是很難修正路線的。只能照著原本預想的路線前進。
-Increases Front Tyre Ware
這個比較有趣,前面竟然說了前輪抓地力會下降,但為什麼又有增加前輪磨耗這點呢?
因為在進彎時雖然拋出去的方式使前輪磨耗底,但在進入彎道後路線卻是一直在收,所以實際上整個彎道中前輪的負荷是漸進式的加重,又在大傾角的狀態下對前輪的消耗是非常考驗的,所以反而騎乘下來會增加前輪的磨耗。
-High Risk of Crashing
這點算是綜合以上幾點連鎖反應所造成的結果。Understeering的騎法在拋進彎的時候就已經是大傾角狀態,又是前輪抓地力較弱的狀態,而且無法修正路線,所以對車輛運動來說這種狀態本來就是比較會有高風險的過彎方式。
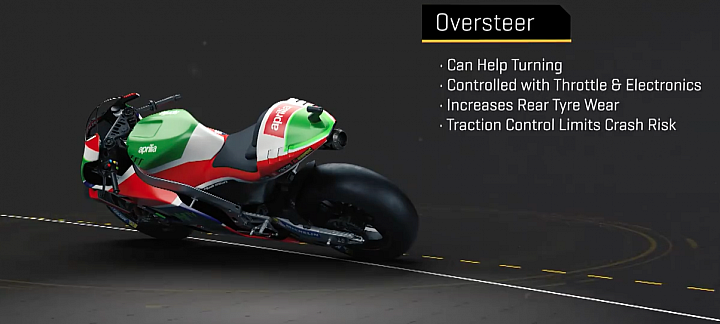
Fornt Tyre: + MORE GRIP
Rear Tyre:- LESS GRIP
我個人覺得Oversteering的騎乘方法的出現有很大功勞要歸功於電控系統的成熟。在WGP時代可以看到在彎道中只要有Oversteering的操控發生的時候幾乎都是一瞬間而且通常是失控狀態,下一秒不是救回來就是直接highside。對那時候的車手來說Oversteering從來都不是他們的選項,反而是他們要克制的頻臨極限騎乘方法。
但是到了電控系統的成熟與一定程度的介入之後,包含電子油門與電子噴射系統共同達成的細膩控制讓Oversteering從夢魘變成一項新的武器。因為車手們終於能在這個臨界點進行細膩的操控了,而且就算用超過臨界的油門也有電控協助穩定,進而開啟了Oversteering這個大門。
在Oversteering的騎乘方法進彎時前避震從煞車就開始持續壓縮,而前輪也維持著進彎減速的抓地力,對於前輪的狀態就如下圖,是跟Understeering相反的
在傾角沒有增加的情況下讓前輪吃著車子的荷重,維持著正X方向的向心力。然後油門開下去後輪就開始滑動,這就是上面所寫的前輪抓地力多,後輪少的狀況。但是在後輪滑動的情況下,雖然前輪的荷重會吃比較多,但後輪的重心反而會繼續維持著,車輛從進彎到出彎的重心轉移反而是比較小的變動,讓車輛在彎中有提早修正到出彎方向與提早開油的優點。也是GP中慣用的技巧。
-Can Help Turning
因為這種前輪導向的騎法,讓車輛在彎中幾乎就以隨時可以出彎的運動型態過彎,所以對於轉向的幫助是比較大的。
-Controlled with Throttle & Electronics
如前面所說,畢竟後輪在處於滑動的狀態是非常難控制的臨界點,一旦恢復滑動就是highside,過度滑動就是lowside。所以在這種騎乘方法之下油門成了整個控制關鍵,另外電控的補助優劣也成了秒數的關鍵!
像之前來跑大鵬灣的澳洲車手第一次用杜卡迪的時候是開著電控跑的,後來用Kawasaki的時候他關掉電控反而跑出更好的成績。當然這並不表示日本車就一定比較差,有時候車手的習慣也是很重要,所以大排氣量車在跑賽道的時候電控系統有沒有辦法經過技師快速調整成適合車手的也是事關整個比賽的成績重點。
-Increases Real Tyre Wear
後輪在滑動的狀態下,對於後輪的磨耗一定是比較多的。所以這種騎法也要拿捏,並不能夠全場都這麼拼下去,不然在比賽尾端的時候會因為後輪的過度磨耗導致抓地力下降而失去秒數,這種失誤在GP中已經屢見不鮮了。
-Traction Control Limits Crash Risk
以現在的車來說,就算沒有電控的補助也是能夠這樣騎的,畢竟油門的細膩度已經比起以前細膩多了,但畢竟是臨界狀態,只要任何的一點點over就會有可能導致摔車,所以最後還是的強調有電控的協助可以大幅減少這類失誤的發生。
雖然這是短短不到一分鐘的影片,但裡面卻涵蓋了龐大的機械原理與物理運動know-how。畢竟在一般的騎乘根本練不到這項技術,更不用說道路騎乘。MotoGP可以說是兩輪科技的領先者,他們車上的技術都是過了好幾年甚至至今都還未下放到道路車。然而隨著科技的進展黑科技技術下放的區間也開始縮短了。
我本身是老派騎士,都是非常不喜歡電控系統的,無論騎上什麼車只要能關的控制系統甚至連ABS都會關閉。但隨著現代科技發展而改變的騎乘方式,車子的操控已經不單單是靠騎士的技術了,而是需要人(技術)車(電控)合一才是快的關鍵。本田在這點的目標都是做出讓任何騎士都能輕鬆上手的車,在市售車CBR上我們也的卻看出它的成功點。
但隨著消費者對於客製化的需求,未來的電腦在AI極力發展之下,用適當的程式寫出能夠快速掌握騎士習慣而改變成客製化系統的Machine Learning就成了關鍵。然而相信這也是各家車廠不斷在努力的目標!
RHT責任編輯
新手akira
20 July 2018
01:16





























































































